回路はこんな感じ
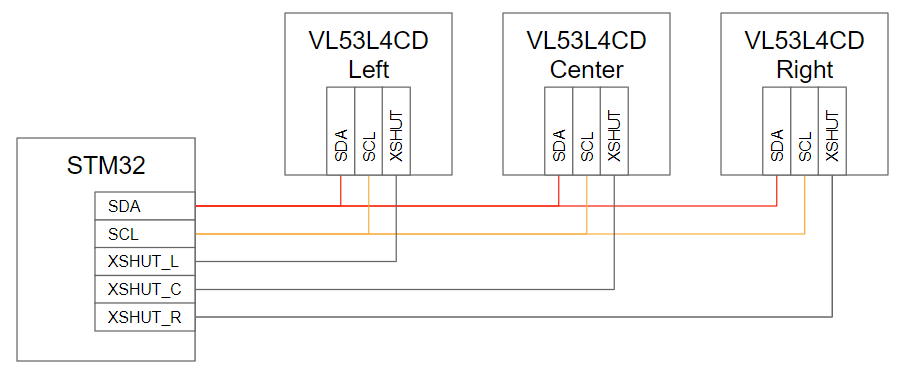
デフォルトアドレスは0x52なのですが、複数接続したい場合競合してしまいます。
特定のレジスタ(?レジスタマップは公開されていない)に書き込むことでI2Cアドレスは変更できるのですが困ったことに電源を切ったりXSHUTをLOWにすると揮発します(ドキュメントに書いておいて欲しかった)
なので毎回初期化時にアドレス設定します。
/**
* @brief Initializes the ranging sensor.
* @param Instance Ranging sensor instance.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_Init(uint32_t Instance)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else
{
CUSTOM_RANGING_SENSOR_SetPowerMode(Instance, CUSTOM_RANGING_POWERMODE_OFF);
CUSTOM_RANGING_SENSOR_SetPowerMode(Instance, CUSTOM_RANGING_POWERMODE_ON);
VL53L4CD_Probe(Instance);
CUSTOM_RANGING_SENSOR_SetAddress(Instance, g_ToFDevice[Instance].I2CAddress);
ret = BSP_ERROR_NONE;
}
return ret;
}↓例
CUSTOM_RANGING_SENSOR_Init(TOF_INSTANCE_L);
CUSTOM_RANGING_SENSOR_Init(TOF_INSTANCE_C);
CUSTOM_RANGING_SENSOR_Init(TOF_INSTANCE_R);
CUSTOM_RANGING_SENSOR_Start(TOF_INSTANCE_L, VL53L4CD_MODE_ASYNC_CONTINUOUS);
CUSTOM_RANGING_SENSOR_Start(TOF_INSTANCE_C, VL53L4CD_MODE_ASYNC_CONTINUOUS);
CUSTOM_RANGING_SENSOR_Start(TOF_INSTANCE_R, VL53L4CD_MODE_ASYNC_CONTINUOUS);
int range[3]; // 測距センサ3つ分の測定値
for(;;)
{
CUSTOM_RANGING_SENSOR_GetDistance(TOF_INSTANCE_L, &result);
range[0] = result.ZoneResult[0].Distance[0];
CUSTOM_RANGING_SENSOR_GetDistance(TOF_INSTANCE_C, &result);
range[1] = result.ZoneResult[0].Distance[0];
CUSTOM_RANGING_SENSOR_GetDistance(TOF_INSTANCE_R, &result);
range[2] = result.ZoneResult[0].Distance[0];
osDelay(100);
}
以下ソースコード全文
/**
******************************************************************************
* @file custom_ranging_sensor.c
* @author IMG SW Application Team
* @brief This file provides BSP Ranging Sensors interface for custom boards
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "custom_ranging_sensor.h"
VL53L4CD_Object_t CUSTOM_RANGING_CompObj[CUSTOM_RANGING_INSTANCES_NBR] = {0};
static VL53L4CD_Capabilities_t RANGING_SENSOR_Cap[CUSTOM_RANGING_INSTANCES_NBR];
const RANGING_SENSOR_DeviceDiscriptor_t g_ToFDevice[USE_CUSTOM_RANGING_VL53L4CD] =
{
[TOF_INSTANCE_L] = {.GPIOx = TOF_L_XSHUT_GPIO_Port, .GPIO_Pin = TOF_L_XSHUT_Pin, .I2CAddress = TOF_I2C_ADDRESS_L},
[TOF_INSTANCE_C] = {.GPIOx = TOF_C_XSHUT_GPIO_Port, .GPIO_Pin = TOF_C_XSHUT_Pin, .I2CAddress = TOF_I2C_ADDRESS_C},
[TOF_INSTANCE_R] = {.GPIOx = TOF_R_XSHUT_GPIO_Port, .GPIO_Pin = TOF_R_XSHUT_Pin, .I2CAddress = TOF_I2C_ADDRESS_R},
};
static int32_t VL53L4CD_Probe(uint32_t Instance);
/**
* @brief Initializes the ranging sensor.
* @param Instance Ranging sensor instance.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_Init(uint32_t Instance)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else
{
CUSTOM_RANGING_SENSOR_SetPowerMode(Instance, CUSTOM_RANGING_POWERMODE_OFF);
CUSTOM_RANGING_SENSOR_SetPowerMode(Instance, CUSTOM_RANGING_POWERMODE_ON);
VL53L4CD_Probe(Instance);
CUSTOM_RANGING_SENSOR_SetAddress(Instance, g_ToFDevice[Instance].I2CAddress);
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Deinitializes the ranging sensor.
* @param Instance Ranging sensor instance.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_DeInit(uint32_t Instance)
{
int32_t ret;
if(Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.DeInit(&CUSTOM_RANGING_CompObj[Instance]) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Read the ranging sensor device ID.
* @param Instance Ranging sensor instance.
* @param pId Pointer to the device ID.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_ReadID(uint32_t Instance, uint32_t *pId)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.ReadID(&CUSTOM_RANGING_CompObj[Instance], pId) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Get the ranging sensor capabilities.
* @param Instance Ranging sensor instance.
* @param pCapabilities Pointer to the ranging sensor capabilities.
* @note This function should be called after the init.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_GetCapabilities(uint32_t Instance, VL53L4CD_Capabilities_t *pCapabilities)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.GetCapabilities(&CUSTOM_RANGING_CompObj[Instance], pCapabilities) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Set the ranging configuration profile.
* @param Instance Ranging sensor instance.
* @param pConfig Pointer to the new configuration profile to be applied.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_ConfigProfile(uint32_t Instance, VL53L4CD_ProfileConfig_t *pConfig)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.ConfigProfile(&CUSTOM_RANGING_CompObj[Instance], pConfig) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Configure the Region of Interest of the ranging sensor.
* @param Instance Ranging sensor instance.
* @param pConfig Pointer to the ROI configuration struct.
* @note Should be called only if the device supports CustomROI.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_ConfigROI(uint32_t Instance, VL53L4CD_ROIConfig_t *pConfig)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (RANGING_SENSOR_Cap[Instance].CustomROI == 0)
{
ret = BSP_ERROR_FEATURE_NOT_SUPPORTED;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.ConfigROI(&CUSTOM_RANGING_CompObj[Instance], pConfig) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Configure the IT event generation parameters.
* @param Instance Ranging sensor instance.
* @param pConfig Pointer to the IT configuration struct.
* @note The threshold modes can be used only if supported by the device (check the capabilities)
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_ConfigIT(uint32_t Instance, VL53L4CD_ITConfig_t *pConfig)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.ConfigIT(&CUSTOM_RANGING_CompObj[Instance], pConfig) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Get the last distance measurement information.
* @param Instance Ranging sensor instance.
* @param pResult Pointer to the result struct.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_GetDistance(uint32_t Instance, VL53L4CD_Result_t *pResult)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.GetDistance(&CUSTOM_RANGING_CompObj[Instance], pResult) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Start ranging.
* @param Instance Ranging sensor instance.
* @param Mode The desired ranging mode.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_Start(uint32_t Instance, uint8_t Mode)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.Start(&CUSTOM_RANGING_CompObj[Instance], Mode) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Stop ranging.
* @param Instance Ranging sensor instance.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_Stop(uint32_t Instance)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.Stop(&CUSTOM_RANGING_CompObj[Instance]) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Set The I2C address of the device.
* @param Instance Ranging sensor instance.
* @param Address New I2C address.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_SetAddress(uint32_t Instance, uint32_t Address)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.SetAddress(&CUSTOM_RANGING_CompObj[Instance], Address) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Get the I2C address of the device.
* @param Instance Ranging sensor instance.
* @param pAddress Pointer to the current I2C address.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_GetAddress(uint32_t Instance, uint32_t *pAddress)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.GetAddress(&CUSTOM_RANGING_CompObj[Instance], pAddress) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Set the power mode.
* @param Instance Ranging sensor instance.
* @param PowerMode New power mode to be entered.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_SetPowerMode(uint32_t Instance, uint32_t PowerMode)
{
GPIO_PinState state;
if (PowerMode == CUSTOM_RANGING_POWERMODE_ON)
{
state = GPIO_PIN_SET;
}
else if (PowerMode == CUSTOM_RANGING_POWERMODE_OFF)
{
state = GPIO_PIN_RESET;
}
else
{
return BSP_ERROR_WRONG_PARAM;
}
HAL_GPIO_WritePin(g_ToFDevice[Instance].GPIOx, g_ToFDevice[Instance].GPIO_Pin, state);
HAL_Delay(2);
return BSP_ERROR_NONE;
}
/**
* @brief Set the power mode.
* @param Instance Ranging sensor instance.
* @param pPowerMode Pointer to the current power mode.
* @retval BSP status
*/
int32_t CUSTOM_RANGING_SENSOR_GetPowerMode(uint32_t Instance, uint32_t *pPowerMode)
{
int32_t ret;
if (Instance >= CUSTOM_RANGING_INSTANCES_NBR)
{
ret = BSP_ERROR_WRONG_PARAM;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.GetPowerMode(&CUSTOM_RANGING_CompObj[Instance], pPowerMode) < 0)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
return ret;
}
/**
* @brief Register Bus IOs if component ID is OK.
* @param Instance Ranging sensor instance.
* @retval BSP status
*/
static int32_t VL53L4CD_Probe(uint32_t Instance)
{
int32_t ret;
VL53L4CD_IO_t IOCtx;
/* Configure the ranging sensor driver */
IOCtx.Address = RANGING_SENSOR_VL53L4CD_DEFAULT_ADDRESS;
IOCtx.Init = CUSTOM_VL53L4CD_I2C_Init;
IOCtx.DeInit = CUSTOM_VL53L4CD_I2C_DeInit;
IOCtx.WriteReg = CUSTOM_VL53L4CD_I2C_WriteReg;
IOCtx.ReadReg = CUSTOM_VL53L4CD_I2C_ReadReg;
IOCtx.GetTick = BSP_GetTick;
if (VL53L4CD_RegisterBusIO(&CUSTOM_RANGING_CompObj[Instance], &IOCtx) != VL53L4CD_OK)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
if (VL53L4CD_RANGING_SENSOR_Driver.Init(&CUSTOM_RANGING_CompObj[Instance]) != VL53L4CD_OK)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else if (VL53L4CD_RANGING_SENSOR_Driver.GetCapabilities(&CUSTOM_RANGING_CompObj[Instance], &RANGING_SENSOR_Cap[Instance]) != VL53L4CD_OK)
{
ret = BSP_ERROR_COMPONENT_FAILURE;
}
else
{
ret = BSP_ERROR_NONE;
}
}
return ret;
}
/**
******************************************************************************
* @file custom_ranging_sensor.h
* @author IMG SW Application Team
* @brief This file contains definitions for the BSP Ranging Sensors
* interface for custom boards
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CUSTOM_RANGING_SENSOR_H__
#define __CUSTOM_RANGING_SENSOR_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "custom_tof_conf.h"
#include "ranging_sensor.h"
#include "vl53l4cd.h"
#define RANGING_SENSOR_VL53L4CD_DEFAULT_ADDRESS (VL53L4CD_DEVICE_ADDRESS)
#define RANGING_SENSOR_NB_TARGET_PER_ZONE (VL53L4CD_NB_TARGET_PER_ZONE)
#define RANGING_SENSOR_MAX_NB_ZONES (VL53L4CD_MAX_NB_ZONES)
#define RS_MODE_BLOCKING_CONTINUOUS (VL53L4CD_MODE_BLOCKING_CONTINUOUS)
#define RS_MODE_BLOCKING_ONESHOT (VL53L4CD_MODE_BLOCKING_ONESHOT)
#define RS_MODE_ASYNC_CONTINUOUS (VL53L4CD_MODE_ASYNC_CONTINUOUS)
#define RS_MODE_ASYNC_ONESHOT (VL53L4CD_MODE_ASYNC_ONESHOT)
#define CUSTOM_RANGING_INSTANCES_NBR (USE_CUSTOM_RANGING_VL53L4CD)
#define CUSTOM_RANGING_POWERMODE_ON (0U) /*!< run */
#define CUSTOM_RANGING_POWERMODE_OFF (1U) /*!< standby */
#if (CUSTOM_RANGING_INSTANCES_NBR == 0U)
#error "No ranging sensor instance has been selected"
#endif
typedef struct
{
uint32_t NumberOfZones;
uint32_t MaxNumberOfTargetsPerZone;
uint32_t CustomROI; /*!< Not available: 0, Available: 1 */
uint32_t ThresholdDetection; /*!< Not available: 0, Available: 1 */
} RANGING_SENSOR_Capabilities_t;
typedef struct
{
uint32_t RangingProfile;
uint32_t TimingBudget; /*!< Expressed in milliseconds */
uint32_t Frequency; /*!< Expressed in Hz */
uint32_t EnableAmbient; /*<! Enable: 1, Disable: 0 */
uint32_t EnableSignal; /*<! Enable: 1, Disable: 0 */
} RANGING_SENSOR_ProfileConfig_t;
typedef struct
{
uint8_t TopLeftX; /*!< Top Left x coordinate */
uint8_t TopLeftY; /*!< Top Left y coordinate */
uint8_t BotRightX; /*!< Bot Right x coordinate */
uint8_t BotRightY; /*!< Bot Right y coordinate */
} RANGING_SENSOR_ROIConfig_t;
typedef struct
{
uint32_t Criteria;
uint32_t LowThreshold;
uint32_t HighThreshold;
} RANGING_SENSOR_ITConfig_t;
typedef struct
{
uint32_t NumberOfTargets;
uint32_t Distance[RANGING_SENSOR_NB_TARGET_PER_ZONE]; /*!< millimeters */
uint32_t Status[RANGING_SENSOR_NB_TARGET_PER_ZONE]; /*!< OK: 0, NOK: !0 */
float_t Ambient[RANGING_SENSOR_NB_TARGET_PER_ZONE]; /*!< kcps / spad */
float_t Signal[RANGING_SENSOR_NB_TARGET_PER_ZONE]; /*!< kcps / spad */
} RANGING_SENSOR_ZoneResult_t;
typedef struct
{
uint32_t NumberOfZones;
RANGING_SENSOR_ZoneResult_t ZoneResult[RANGING_SENSOR_MAX_NB_ZONES];
} RANGING_SENSOR_Result_t;
typedef struct
{
GPIO_TypeDef *GPIOx;
uint16_t GPIO_Pin;
uint32_t I2CAddress;
} RANGING_SENSOR_DeviceDiscriptor_t;
typedef enum _TOFInstance{
TOF_INSTANCE_L = 0,
TOF_INSTANCE_C ,
TOF_INSTANCE_R ,
}TOFInstance;
typedef enum _TOFI2CAddress{
TOF_I2C_ADDRESS_L = RANGING_SENSOR_VL53L4CD_DEFAULT_ADDRESS + 2,
TOF_I2C_ADDRESS_C = RANGING_SENSOR_VL53L4CD_DEFAULT_ADDRESS + 4,
TOF_I2C_ADDRESS_R = RANGING_SENSOR_VL53L4CD_DEFAULT_ADDRESS + 8,
}TOFI2CAddress;
extern VL53L4CD_Object_t CUSTOM_RANGING_CompObj[CUSTOM_RANGING_INSTANCES_NBR];
extern const RANGING_SENSOR_DeviceDiscriptor_t g_ToFDevice[USE_CUSTOM_RANGING_VL53L4CD];
int32_t CUSTOM_RANGING_SENSOR_Init(uint32_t Instance);
int32_t CUSTOM_RANGING_SENSOR_DeInit(uint32_t Instance);
int32_t CUSTOM_RANGING_SENSOR_ReadID(uint32_t Instance, uint32_t *pId);
int32_t CUSTOM_RANGING_SENSOR_GetCapabilities(uint32_t Instance, VL53L4CD_Capabilities_t *pCapabilities);
int32_t CUSTOM_RANGING_SENSOR_ConfigProfile(uint32_t Instance, VL53L4CD_ProfileConfig_t *pConfig);
int32_t CUSTOM_RANGING_SENSOR_ConfigROI(uint32_t Instance, VL53L4CD_ROIConfig_t *pConfig);
int32_t CUSTOM_RANGING_SENSOR_ConfigIT(uint32_t Instance, VL53L4CD_ITConfig_t *pConfig);
int32_t CUSTOM_RANGING_SENSOR_GetDistance(uint32_t Instance, VL53L4CD_Result_t *pResult);
int32_t CUSTOM_RANGING_SENSOR_Start(uint32_t Instance, uint8_t Mode);
int32_t CUSTOM_RANGING_SENSOR_Stop(uint32_t Instance);
int32_t CUSTOM_RANGING_SENSOR_SetAddress(uint32_t Instance, uint32_t Address);
int32_t CUSTOM_RANGING_SENSOR_GetAddress(uint32_t Instance, uint32_t *pAddress);
int32_t CUSTOM_RANGING_SENSOR_SetPowerMode(uint32_t Instance, uint32_t PowerMode);
int32_t CUSTOM_RANGING_SENSOR_GetPowerMode(uint32_t Instance, uint32_t *pPowerMode);
#ifdef __cplusplus
}
#endif
#endif /* __CUSTOM_RANGING_SENSOR_H__ */
/**
******************************************************************************
* @file custom_tof_conf.h
* @author IMG SW Application Team
* @brief This file contains definitions of the TOF components bus interfaces
* for custom boards
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CUSTOM_TOF_CONF_H__
#define __CUSTOM_TOF_CONF_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32g4xx_hal.h"
#include "custom_bus.h"
#include "custom_errno.h"
/* USER CODE BEGIN 1 */
#include "main.h"
/* USER CODE END 1 */
#define USE_CUSTOM_RANGING_VL53L4CD (3U)
#define CUSTOM_VL53L4CD_I2C_Init BSP_I2C2_Init
#define CUSTOM_VL53L4CD_I2C_DeInit BSP_I2C2_DeInit
#define CUSTOM_VL53L4CD_I2C_WriteReg BSP_I2C2_Send
#define CUSTOM_VL53L4CD_I2C_ReadReg BSP_I2C2_Recv
#ifdef __cplusplus
}
#endif
#endif /* __CUSTOM_TOF_CONF_H__*/